With its efficient system architecture and intuitive interface, NODE.OS minimizes setup and operational effort. This enables quick, hassle-free installation and maintenance, allowing you to save valuable time and resources while enhancing productivity in your robotics operations.
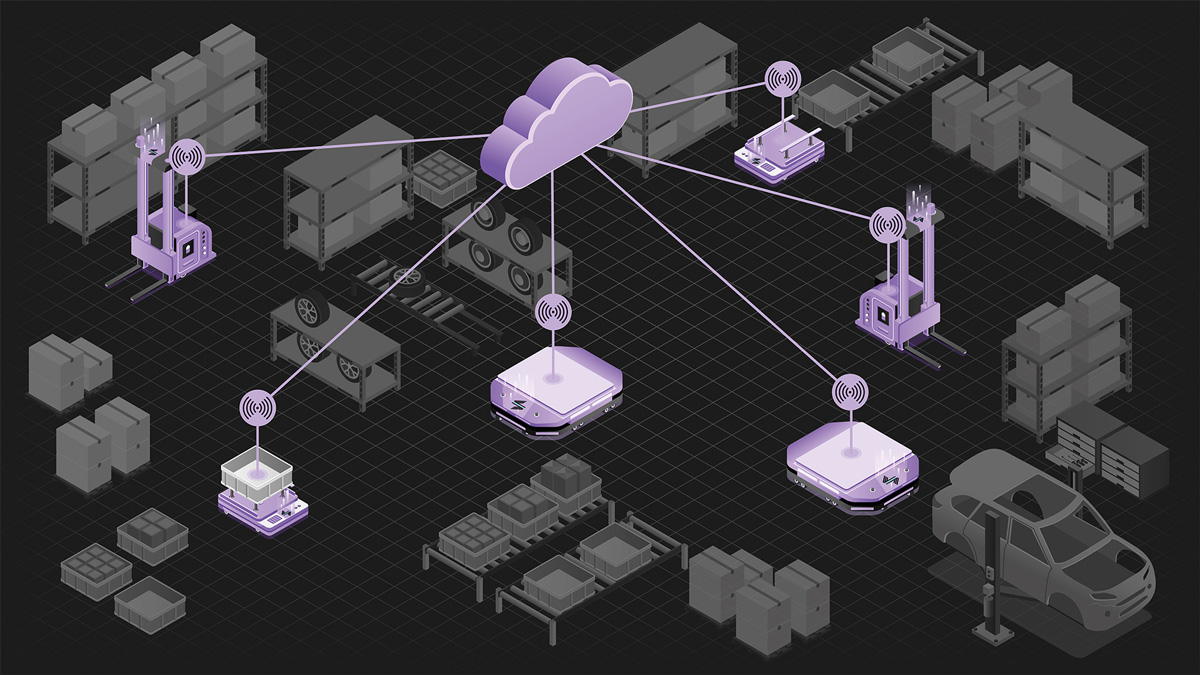
A versatile software platform for every mobile robot system
Choose the right modular mobile robot software solution, tailored to your specific business needs
NODE.OS is trusted by businesses –
Plug and Play
High Modularity
The modular design of NODE.OS allows for easy configuration to suit diverse robotics applications. This flexibility ensures a tailored and efficient solution for your specific operational needs, enhancing both adaptability and performance.
Proven Reliability
NODE.OS delivers consistent performance in demanding intralogistics and warehouse environments. With over 1,000 robots operating globally across various industries, our platform has a proven track record of success. Supported by exceptional customer service, you can rely on NODE.OS to provide dependable and consistent results for your mobile robots.
Zero Hardware Modifications
Achieve seamless integration without the need for hardware changes. NODE.OS is designed to work effortlessly with your existing hardware and sensor setups, enabling quick deployment and reducing both time and costs.
Trusted Customers & Development Partners
Explore our portfolio to see how our strategic partnerships deliver proven
results and long-term success in the mobile robotics industry
Pinpoint every vehicle, not just mobile robots
Bring manual vehicles onto the digital map with precise, real-time tracking.
Our robust SLAM localization safeguards efficiency and safety across your mixed fleet.
Get the essentials in one page
Get our concise product overviews for a fast,
clear snapshot of NODE solutions.

Looking for the right solution for your robotics needs?
Let’s explore your options together.
Our team is ready to show you how our solutions
can help your business.
Contact